模糊PID控制的规则表一点理解 |
您所在的位置:网站首页 › kp kd ki怎么算 › 模糊PID控制的规则表一点理解 |
模糊PID控制的规则表一点理解
|
目录
前言参考过程
前言
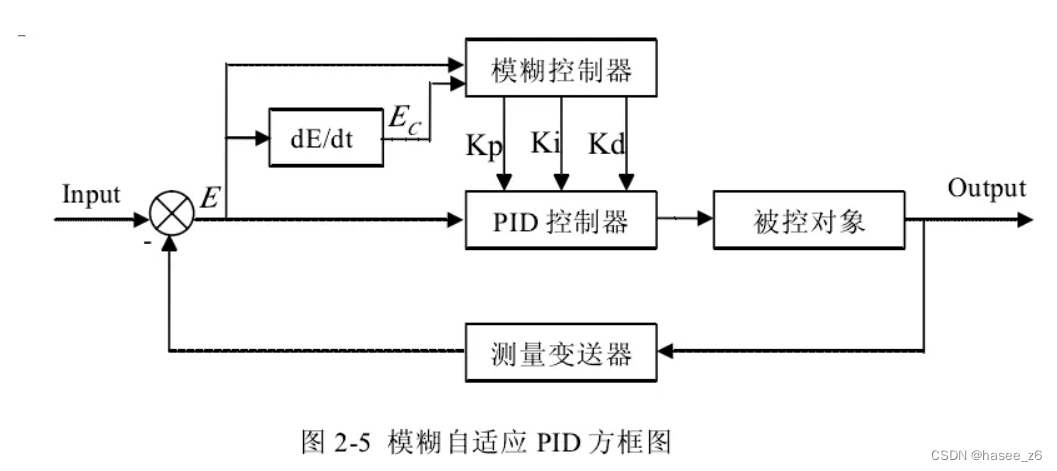
最近在学习模糊PID控制,对于模糊PID控制的规则表有一点疑惑,然后上网查了一下资料,记录一下。 参考怎么理解模糊pid控制表?@人间苦旅 过程模糊PID控制器的输入值是偏差e和偏差变化率ec,经过模糊化处理后,由模糊推理系统进行近似推理,得出在一定偏差和偏差变化率的情况下,Kp、Ki、Kd的校正量 ΔKp、ΔKi、ΔKd,经过清晰化后与初始 PID 参数相叠加,在系统偏差和偏差变化率的不断变化中实时调节 PID 参数,从而实现PID参数的自整定。用数学式是表示为:
K
p
=
K
p
′
+
Δ
K
p
(1)
K_p=K_p'+{\Delta K_p}\tag{1}
Kp=Kp′+ΔKp(1)如下图所示 我们来看这张
K
p
K_p
Kp的表
i
f
E
=
P
B
,
E
C
=
P
B
,
t
h
e
n
k
p
=
N
B
if E = PB, EC = PB, then\ kp = NB
ifE=PB,EC=PB,then kp=NB 对于 i f E = N M , E C = P B , t h e n k p = N S ( k p = Z O ) if E = NM, EC = PB, then\ kp = NS(kp = ZO) ifE=NM,EC=PB,then kp=NS(kp=ZO) 我的个人理解是两种都可以,看具体情况。假如说EC变化率往正的方向变得太快,可能会产生超调,所以 k p = N S kp = NS kp=NS,或者说你觉得这个变化率可以,不会影响,那你就 k p = Z O kp = ZO kp=ZO 赠人玫瑰,手有余香。点个赞啦! |
 图中
图中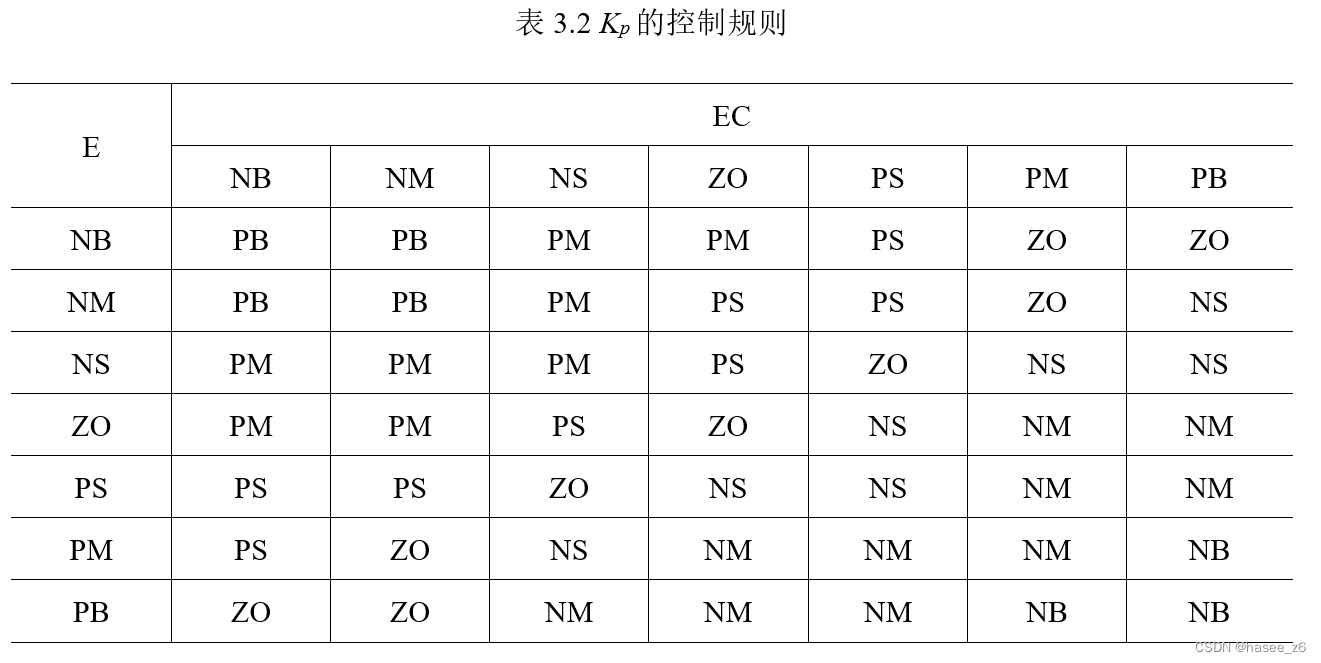 规则应该是误差
E
=
测量值(实际值)—设定值
E=测量值(实际值)— 设定值
E=测量值(实际值)—设定值而EC就是误差的变化率,表示误差的变化方向
规则应该是误差
E
=
测量值(实际值)—设定值
E=测量值(实际值)— 设定值
E=测量值(实际值)—设定值而EC就是误差的变化率,表示误差的变化方向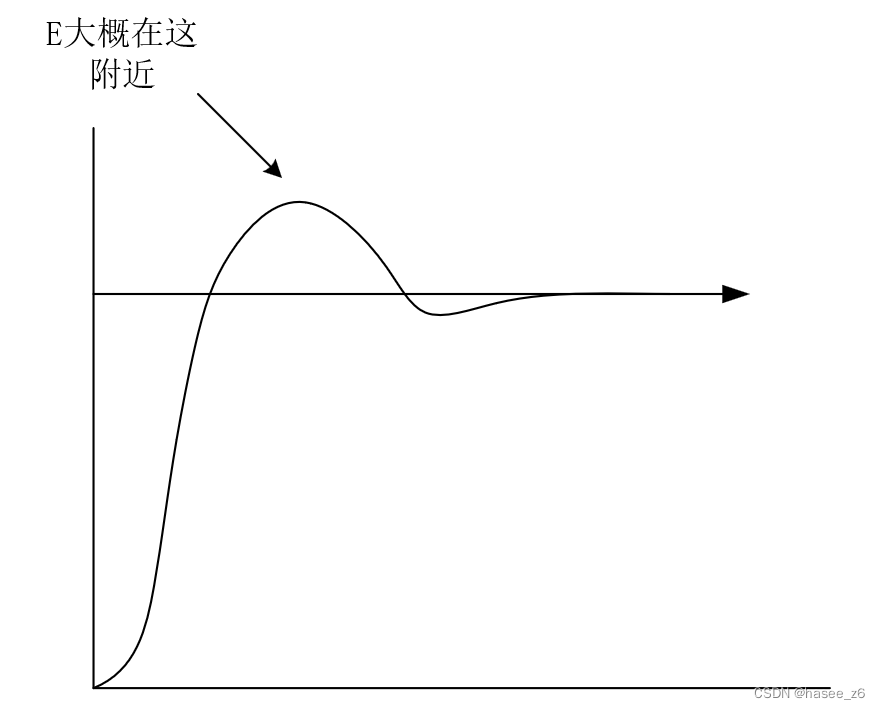 从图中可以看出,误差已经超过设定值(正大),并且误差变化率EC是正的(正大),那么下一时刻的误差还会一直增加(变大)。我们知道
K
p
K_p
Kp过大会引起超调,所以我们要减小
K
p
K_p
Kp,也就是减小
Δ
K
p
{\Delta K_p}
ΔKp,所以
k
p
=
N
B
kp = NB
kp=NB(负大),其余都依次类推。
从图中可以看出,误差已经超过设定值(正大),并且误差变化率EC是正的(正大),那么下一时刻的误差还会一直增加(变大)。我们知道
K
p
K_p
Kp过大会引起超调,所以我们要减小
K
p
K_p
Kp,也就是减小
Δ
K
p
{\Delta K_p}
ΔKp,所以
k
p
=
N
B
kp = NB
kp=NB(负大),其余都依次类推。【本文地址】